Proyectos CARTIF
ROSBAC
Robótica Socio-Bio-Cooperativa aplicada al envejecimiento activo
Descripción
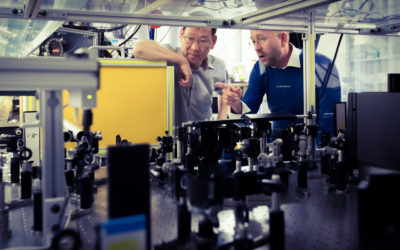
El objetivo es desarrollar una nueva generación dispositivos robóticos Socio-Bio-Cooperativos con los usuarios, basados en tecnología háptica combinada con el novedoso enfoque de control Socio-Bio-Cooperativo de los sistemas robóticos, el cuál propone usar las señales biofísicas de los usuarios para adaptar su reacción al estado de los mismos. En el marco de este proyecto también se propone aplicar estos dispositivos socio-bio-cooperativos en un entorno de geriatría para favorecer el envejecimiento activo y aumentar la calidad de vida de los usuarios.
Esta combinación de tecnologías dará un salto en las capacidades de los dispositivos robóticos en la interactuación con los usuarios a nivel físico-emocional logrando que sea natural y autónoma. Esta nueva generación de dispositivos Socio-Bio-Cooperativos podrá interactuar físicamente con las personas mayores y adaptarse a las necesidades físico-emocionales de estas personas. Lo cual se traducirá en que las personas mayores podrán realizar ejercicio físico adaptado de forma on-line a sus capacidades físico-emocionales, impactando de una forma positiva en su salud a nivel general y por ende, en una mejora de autonomía personal y una menor demanda de los servicios socio-asistenciales del Sistema de salud pública.
Objetivos
- Desarrollo de un prototipo robótico Socio-Bio-Cooperativo con capacidad para interactuar a nivel físico y emocional con personas mayores.
- Adaptación e interacción del prototipo robótico al estado físico y emocional del paciente de forma natural y autónoma en tiempo real.
- Demostración del funcionamiento del prototipo en usuarios finales.
Acciones
- Definición de requisitos del dispositivo robótico Socio-Bio-Cooperativo.
- Diseño de terapias lúdicas de envejecimiento activo.
- Diseño e implementación del dispositivo robótico Socio-Bio-Cooperativo.
- Desarrollo de terapias lúdicas de envejecimiento activo.
- Validación del prototipo del dispositivo Socio-Bio-Cooperativo.
Resultados esperados
- Desarrollo de un prototipo funcional con un grado libertad.
- Implementación de terapias que mejoren la actividad de los usuarios.
- Configuración de terapias adaptativas a las necesidades de los usuarios y fisioterapeutas.
- Testado y validado por usuarios finales.
Oferta tecnológica
MV Geriatría
![]()
Industrias Rios S.L

Presupuesto CARTIF: 177.500€
Duración: 11/07/2022 – 31/07/2024
Responsable
César Domínguez Vega
División de Sistemas Industriales y Digitales
cesdom@cartif.es
Networking
Proyectos de Soluciones Industriales:

Incorporación de nuevos equipos y procesos para mejora del laboratorio de fabricación digital avanzada
Adquisición de elementos tecnológicos avanzados que permitan potenciar los servicios de prototipado rápido, así como respaldar los desarrollos específicos dados en los desafiantes procesos de creación de objetos no disponibles en el mercado o costosos de producir en cantidades limitadas

LIXIV-IA
LIXIV-IA propone el desarrollo de soluciones basadas en inteligencia artificial (IA) y big data para la optimización de la operación de plantas autónomas contenerizadas

HUMAIN
HUMAIN se centra en la investigación industrial y en la creación de sinergias en dos casos de uso de procesos productivos complejos: Tecnologías habilitadoras verticales e impulso de dichas tecnologías mediante el empleo de IA, IIoT y visión artificial.

STARCONNEXION
StarConnexion trata de sentar las bases científicas y tecnológicas de la aplicación de la Inteligencia Artificial en la gestión de la calidad de las siderurgias de largos a partir de todas las variables posibles que afecten a al calidad final del producto.

Damperdoor
DAMPERDOOR busca desarrollar un sistema competitivo y de altas prestaciones para puertas correderas en el sector del mueble. Estas prestaciones buscan un cierre autocontrolado, con independencia de la fuerza excesiva que un usuario pueda aportar en la acción de cierre y por tanto evitando los golpes y con capacidad para completar el recorrido hasta un cierre total y exacto.

5R
La Red 5R, Red Cervera de tecnologías Robóticas en Fabricación Inteligente, tiene como misión establecer una red colaborativa, dotada con la necesaria tecnología, herramientas e infraestructuras para actuar como elemento tractor del desarrollo e introducción de nuevas tecnologías robóticas en el tejido industrial.

REVAMP
El objetivo principal es desarrollar , adaptar y aplicar nuevas tecnologías para mejorar la eficiencia en el uso de materias primas y energía de los equipos y procesos que tienen lugar en las empresas metalúrgicas.

AGROVIS
“Computación VISual inteligente para productos/procesos del sector AGROalimentario”, es un proyecto de investigación industrial enmarcado en el campo de la visión por computador (habilitador digital de la industria 4.0) asociada al sector agroalimentario.

Intrusión-G4
El proyecto Intrusión-G4 busca nuevas tecnologías para superar el reto de aumentar el grado de seguridad de los sensores de detección de intrusión actualmente disponibles en el mercado.

TRREX
El proyecto TRREX (Tecnologías Habilitadoras para Robot de Rango Extendido para la Factoría Flexible) investiga y desarrolla tecnologías que contribuyan al despliegue de robots industriales móviles para las fábricas del futuro.

NUMASTA
NUMASTA ha permitido el desarrollo de una nueva generación de paneles sándwich FRP para su aplicación en el sector del tratamiento de aguas residuales.
La característica diferenciadora se presenta en su core, basado en una espuma de poliuretano, fabricada mediante formulaciones diseñadas «a la carta».
I-visart
i-Visart, “Nuevas metodologías de visión artificial para la inspección visual integral de superficies altamente reflectantes y texturizadas”, es un proyecto de investigación industrial enmarcado en el campo de la visión por computador (habilitador digital de la industria 4.0) asociada al sector industrial.

HABITAT-RA
CARTIF ha diseñado y desarrollado un novedoso módulo basado en RA para gafas inteligentes basado en el reconocimiento de marcadores QR para lanzar las experiencias de RA, particularizado para tres pilotos tecnológicos: Identificación de riesgos, Gestión del mantenimiento de máquinas y Monitorización del estado de máquinas

PUMAN
Se ha desarrollado un nuevo sistema inteligente para los puestos de montaje manual en la industria. Esta iniciativa pretende minimizar los errores de ensamblado por parte de los operarios mediante la validación de operaciones, proporcionando información y guiando al operario en tiempo real a través de una interfaz hombre-máquina basada en Realidad Aumentada.

DISCOBOLO
Hoy día en la laminación, tanto en caliente como en frio, solo se trabaja sobre elementos “largos” y en la detección de defectos puntuales, no en los defectos longitudinales. Por tanto, el salto tecnológico y la clave diferenciadora de los futuros productos es detectar los defectos tanto puntuales como longitudinales sobre la producción de acero plano en el proceso de laminación, ya sea el proceso en frio o en caliente.

MARCA
MARCA provee al operario de mantenimiento de herramientas que faciliten el acceso a contenidos, comunicaciones y tecnologías necesarias para el guiado, apoyo y registro de las labores de mantenimiento. Se basa en tecnologías de realidad aumentada, movilidad y comunicación, así como una base de conocimiento para la gestión de incidencias.
INCEPTION
INCEPTION desarrolla nuevos métodos y herramientas informáticas para el modelado 3D automatizado y el análisis de los bienes culturales europeos proponiendo avances en hardware y software, así como también nuevos enfoques para el acceso y la explotación de los datos en 3D de esos bienes mediante la denominada Plataforma INCEPTION.

MODINTECO
El objetivo principal del proyecto MODINTECO es desarrollar prototipos de Cambiadores Automáticos de Herramientas para fresadoras que fuesen modulares y adaptables, inteligentes y autónomos…

CALYPSO
El propósito del proyecto CALYPSO es que el proceso de inspección se puede enriquecer mediante técnicas automáticas de reconocimiento de patrones.